













精準掃描深凹槽和難以觸及的區域是3D掃描常見挑戰,讓我們探討如何使用Revopoint 3D掃描器達成最佳效果。
換個角度,更好捕捉
首先使用Revopoint MINI 2 3D掃描器水平掃描小型物件。
初始掃描以水平方向進行兩次完整旋轉,共擷取約300幀畫面。

初步掃描雖能獲取物件大致輪廓,但深凹處(如「腋下」區域)因角度限制會出現明顯缺漏。此時掃描器的深度相機和投影器無法從水平視角有效捕捉這些區域。


為了解決這個問題,另一種方法是將掃描器旋轉90度改為垂直掃描。建議將掃描器側向安裝於三腳架,這樣能保持穩定的垂直掃描姿勢,避免手持造成的晃動。
掃描小技巧
調整角度前,請先卸下三腳架再重新側向安裝。

掃描器角度改變可能導致點雲翻轉。您可透過深度相機設定中的方向按鈕,將預覽視窗切換為直向顯示。


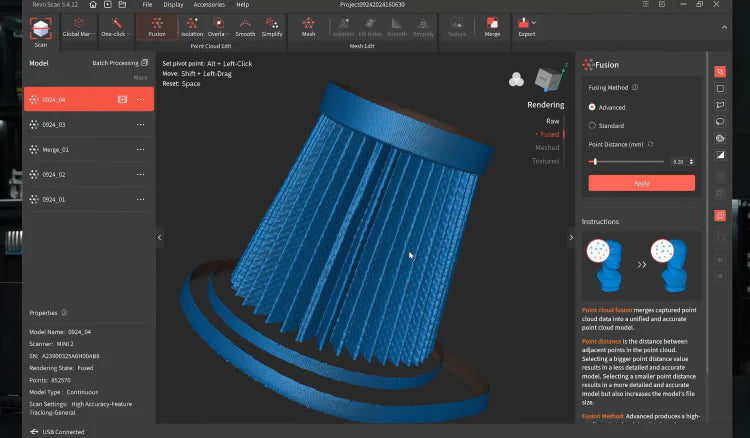
調整裝置後,再進行一次快速掃描,大約採集 300 幀,完成兩圈旋轉,並融合點雲。對比資料集可以發現,大面積的間隙明顯減少,尤其是在狹窄的縫隙處,3D模型變得更加完整。


雖然某些凸起處可能出現新盲區,但原先難以捕捉的凹槽現在已能清晰呈現。合併水平與垂直掃描資料將獲得最佳結果。


多角度資料互補能有效彌補單次掃描的不足。如圖所示,合併後的掃描品質明顯優於單一角度掃描。
原理解析
首先,我們需要了解結構光掃描器的內部結構,以理解其工作原理。
中央投影器發射結構光,MINI 2採用藍光,而POP 3 Plus和RANGE 2採用紅外光。
兩側深度相機透過反射光捕捉物體表面3D形狀。
另有RGB相機負責色彩資訊擷取。

當掃描類似杯子的物體時,投影儀會在其表面投射扇形光束。左右兩側的深度相機從不同角度捕捉這些光線圖案,從而計算深度並生成 3D 點雲。然而,諸如杯柄之類的結構可能會遮擋某些區域,使其超出相機視野,導致掃描資料中出現盲點。




讓我們將這一原理應用於掃描具有深縫隙的物體,例如帶有平行稜脊的真空濾網。
水平掃描時:
-每個稜脊都會在相鄰部分投下陰影。
-由於相鄰稜脊的遮擋,盲點會沿著每個溝槽形成。
-最深的縫隙部分由於無法被兩側相機捕捉,仍然無法掃描到。

垂直掃描時:
-稜脊的排列相對於相機的視角發生變化。
-更容易直接捕捉到更深的部分。
-在連續掃描過程中合併多個幀,可以減少或消除盲點。
(完整說明請參閱:https://forum.revopoint3d.com/t/steamkraft-tutorial-revopoint-mini-2-3d-scanner/23832)
實用技巧與注意事項
不同物件型別需採用專屬掃描策略。
複雜結構
機械零件或雕塑等具有重疊結構的物件,建議多角度掃描後合併資料。
高反光或透明材質
玻璃和金屬表面易產生反光,可使用專用掃描噴霧減少光源反射,並提高點雲的精度。
標記點追蹤
難以追蹤的表面,貼附標記點可提升掃描穩定性與精準度。
最佳操作建議
調整掃描角度外,這些技巧能進一步最佳化成果:
多角度掃描
務必結合水平與垂直掃描以確保完整覆蓋。
調整被掃描物體位置
旋轉或重新擺放被掃描物體有助暴露隱藏面。
使用標記點
對於精細物件或易丟失追蹤的情況,標記點能改善對齊精度。
合併多重掃描
整合不同角度的資料可重建完整幾何結構。
最佳化光源與曝光
適當曝光設定能避免過曝或欠曝影響精度。
詳細操作請觀看教學影片:
掃描原理說明:
https://forum.revopoint3d.com/t/steamkraft-tutorial-revopoint-mini-2-3d-scanner/23832
{kind=link}
留言
所有留言在發布前都會經過審核。
此網站已受到 hCaptcha 保護,且適用 hCaptcha 隱私政策以及服務條款。